Cooperative Driving
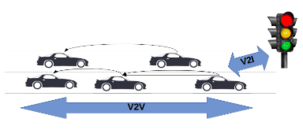
Vehicular communication is the key enabler of future cooperative systems in the areas of driver assistance, automated, and autonomous driving. Compared to recent driver assistance systems, e.g., adaptive cruise control or lane change assistant, that react to their surrounding, cooperative autonomous vehicles can act proactively, e.g., to form a convoy or to coordinate lane changes with each other. Cooperative driving improves autonomous driving as well as manual driving by providing information about other road users, road traffic conditions and traffic signal information. Besides the classical highway scenario, the opportunities in shaping so-called shared spaces are of utmost importance. For example in mixed-traffic scenarios, autonomous vehicles can form convoys behind non-autonomous vehicles that can guide autonomous vehicles safely through inner-city areas.
The cooperation of vehicles poses significant challenges with respect to latency and reliability of radio communication that will be explored in this doctoral research project. The investigations will use a coupling of the communication network and road traffic simulators that has already been successfully employed in SocialCars. The interaction between vehicles and road-side units is modeled for car-following, cooperative lane change, and cooperative traffic interaction. This enables evaluating the impact of communication latency and possible outages on traffic safety and traffic flow. Further, the research evaluates the reliability of cooperative driver assistance systems and its performance with respect to the passenger comfort.
Researcher: Rahi Avinash Shet, M. Tech.
Studentische Forschungsarbeiten
2018
Investigation of CACC-ACC Controller Switching based on Communication Reliability (Sefa Yilmaz)