Online Coordination of Same Day Delivery with Mixed Autonomous Fleets
Same day delivery of goods purchased via the Internet is becoming widely available. The foreseeable availability of autonomous transport vehicles (SAE level 4 or higher) creates opportunities but also new planning and control challenges for city logistics operators – deliveries can be made (under certain preconditions) by autonomous vehicles (“Pods”). To carry multiple deliveries of a single customer by different operators in a customer-friendly and sustainable way, coordination among city logistics operators is required.
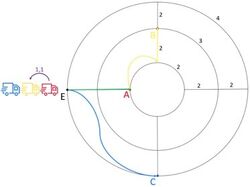
This dissertation shall investigate coordination problems at the operations level. We assume that Pods that serve the same customers shall form dynamic convoys, agreeing on order and time of visiting individual customers. Since operators are self-interested and competing, they have differing preferences over solution alternatives. In this work, we shall study the applicability of methods of algorithmic decision theory (and, in particular, computational social choice theory) to this coordination problem and research voting mechanisms to find solutions that are acceptable to all parties and sustainable from the perspective of urban planning. The work shall also investigate how voting mechanisms can be integrated with traditional optimization approaches. Validation of the results will be carried out through simulation using an agent-based simulation environment.
Researcher: Sinziana-Maria Sebe, M. Sc.