Modeling Interaction among Different Types of Road Users in Shared Spaces
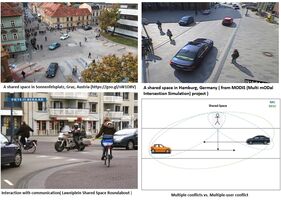
The main motivation of this project is modeling the strategic interaction (conflict handling) between traffic participants in shared space environment. In shared spaces, different transport modes are coexist such as pedestrians, cyclists, motorized vehicles and public transport. In addition, the movement of the traffic participants here conduct based on the social protocol (e.g. courtesy behavior) and informal rules (e.g. colored floors). Participants are interacting more frequent to negotiate the priority over the integrated space. The interaction between different user modes in shared spaces is the result of a complex human decision making process. The goal of this project is to develop a hybrid model for imitating the above behavior. Here, a hybrid model means which can handle both:
- automatic user reactions
- as well as the complicated decision making
In simple situation, the reactive interaction among participants can be modeled by physical approach such as social force model of Helbing and Molnar (1995) [1], which modeled the interaction among pedestrians. In Rinke et al. (2017) [2] and Schönauer et al. (2012) [3], the social force model also extended for other traffic modes. However, to model the complex human decision process, other approaches from algorithmic game and decision theory are particular promising.
In this thesis, the reactive (operational level) interaction among road users will be modeled by a generalized social force model. In addition, the complex conflict among users will be modeled with a game theoretic approach, starting from [3]. However, the model in [3] only solve single conflicts between two road users at a time. This research aims to fill this gap. The validation of the model is planned by using existing real-world trajectories from a shared space environment available in SocialCars from an earlier project. Finally, study cross-relationships between parameters of the game-theoretic interaction model and aspects of shared space design with concern about safety issues and the effectiveness, which can influence the interaction behavior of traffic participants as informal rules, is intended to perform.
References:
1) Helbing, Dirk, and Peter Molnar. "Social force model for pedestrian dynamics." Physical review E 51.5 (1995): 4282.
2) Rinke, N., et al. "A multi-layer social force approach to model interactions in shared spaces using collision prediction." Transportation Research Procedia 25 (2017): 1249-1267.
3) Schönauer, Robert, et al. "Modeling concepts for mixed traffic: Steps toward a microscopic simulation tool for shared space zones." Transportation Research Record: Journal of the Transportation Research Board 2316 (2012): 114-121.
4) Johora, F.T., Kraus, P., Müller, J.P. (2017). Dynamic path planning and movement control in pedestrian simulation. In: van Dam, K.H., Thompson, J. (eds.) Preproceedings of the 2nd In-ternational Workshop on Agent-based modelling of urban systems (ABMUS 2017). Publisher tbd, Sao Paulo, Brazil (May2017) Accepted for workshop. Details
Researcher: Fatema Tuj Johora, M.Sc.