Automatische Generierung von Dynamischen Parkplatzkarten Mittels Crowd-Sensing
Moderne Fahrzeuge werden immer häufiger mit einer Vielzahl von Sensoren ausgestattet, die ihre Umgebung erfassen. Solche Sensoren können genutzt werden, um während der Fahrt parkende Fahrzeuge am Straßenrand zu detektieren. Tragen viele Fahrzeuge zu einem gemeinsamen Datenbestand bei, so erhält man die Information über parkende Fahrzeuge zu vielen verschiedenen Zeitpunkten mit einer Abdeckung des gesamten Stadtgebiets.
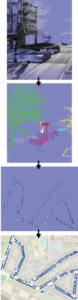
In diesem Projekt sollen aus solchen Daten mit Verfahren des maschinellen Lernens Parkplatzkarten automatisch generiert werden. Die raum-zeitliche Verteilung der Fahrzeugdetektionen ermöglicht es abzuleiten, an welchen Stellen Parkerlaubnis besteht. Herausforderungen ergeben sich aus der Ungenauigkeit der Sensorik sowie aus dem städtischen Parkverhalten, bei dem sich Autofahrer nicht immer an bestehende Vorschriften halten. Die Identifikation von raum-zeitlichen Mustern soll es ermöglichen, eine robuste Parkplatzkarte zu generieren.
Zusätzlich zu dieser statischen Information über die Parkerlaubnis sollen Verfahren entwickelt werden, um die Parkplatzkarte um dynamische Elemente zu erweitern. Dies umfasst sowohl die Erkennung von Änderungen in der Parkerlaubnis beispielsweise bei Großveranstaltung, als auch die Information über aktuell verfügbare Parkplätze. Auch soll die Kommunikation der Informationen zum Beispiel über Car2Car untersucht werden.
Forscher: Dipl.-Phys. Fabian Bock
Studentische Forschungsarbeiten
2015
Learning of legal parking maps from positions of parked vehicles (Jason Liu, DAAD RISE)
Automated identification of parking lanes in topographic data (Simone Görler)
Mobile Mapping in 4D (Eva Kemkes, Dennis Elschen, Carolin Böhme)
Identification of dynamic objects based on radar maps (Matti Henning)